Analysis of accuracy and time for the two-in-one navigation registration technique in dynamic navigation implantation: an in vitro study
XU Min,, WEI Shimin, SHI Junyu, LAI Hongchang,
Department of Dental Implantation, Shanghai Ninth People′s Hospital, Shanghai Jiao Tong University School of Medicine; College of Stomatology, Shanghai Jiao Tong University; National Center for Stomatology; National Clinical Research Center for Oral Diseases; Shanghai Key Laboratory of Stomatology; Shanghai Research Institute of Stomatology, Shanghai 200011, China
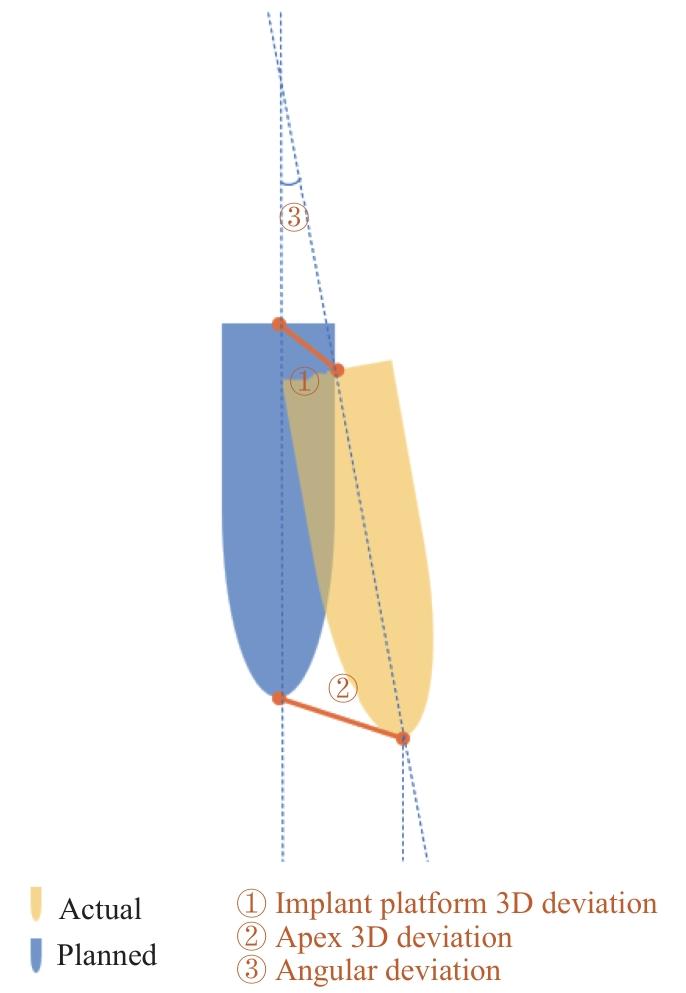
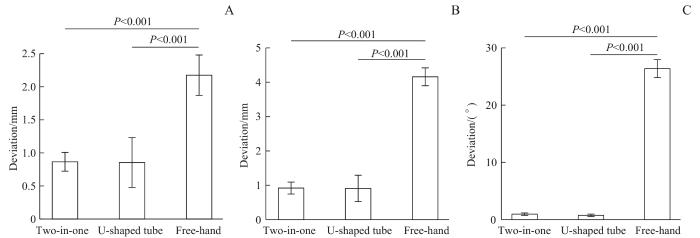
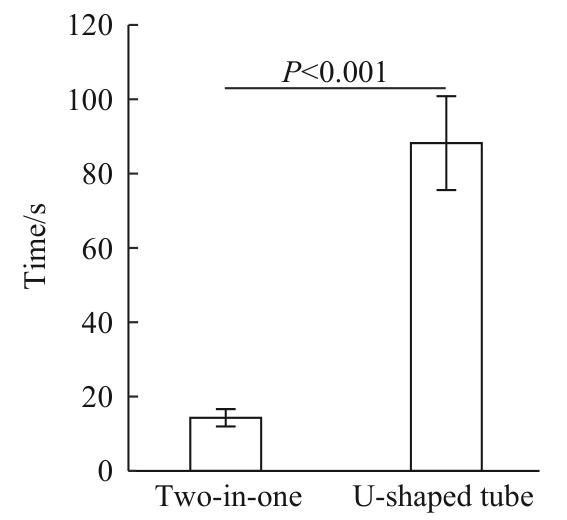
Objective ·To assess the accuracy and time of the two-in-one registration technique by comparing it with the U-shaped tube registration in dynamic navigation implantation. Methods ·Thirty standardized 3D-printed models with mandibular posterior sites missing a single tooth were randomly divided into three groups: two-in-one registration group, U-shaped tube registration group and free-hand implantation group, and the implant surgical plan was designed by the “YIZHIMEI” DCARER oral implant surgery navigation system. Cone beam CT before and after operation was taken. The implant platform deviation, implant apex deviation and angular deviation of the actual implant positions and the designed implant positions were measured. The operating time for using two-in-one registration technique and the U-shaped tube registration technique was recorded to evaluate the complexity of the two registration techniques. The one-way ANOVA and SNK (Student-Newman-Keuls) test were used to analyze the implant platform deviation, implant apex deviation and angular deviation of each group. Results ·There were no statistically significant differences in implant platform deviation, implant apex deviation and angular deviation between the two-in-one registration group and the U-shaped tube registration group (P>0.05). However, the implant platform deviation, implant apex deviation and angular deviation of the two-in-one registration group and the U-shaped tube group were lower than those in the free-hand implantation group, and the differences were statistically significant (P<0.001). The operating time required for the two-in-one registration was shorter than that for the U-shaped tube registration process, and the difference was statistically significant (P<0.001). Conclusion ·The accuracy of the two-in-one dynamic navigation registration technique used in implanting on a model of mandibular posterior sites missing a single tooth is similar to that of the U-shaped tube dynamic navigation registration technique. But the two-in-one registration takes less time for registration procedure than the U-shaped tube registration, and is easier to operate.
Keywords:two-in-one registration technique
;
U-shaped tube registration technique
;
dynamic navigation
;
time for registration procedure
;
accuracy analysis
;
in vitro model study
XU Min, WEI Shimin, SHI Junyu, LAI Hongchang. Analysis of accuracy and time for the two-in-one navigation registration technique in dynamic navigation implantation: an in vitro study. Journal of Shanghai Jiao Tong University (Medical Science)[J], 2024, 44(11): 1433-1438 doi:10.3969/j.issn.1674-8115.2024.11.010
配准过程作为影响精度的关键步骤之一,分为基于标记点的配准和无标记点的配准[4-5]。基于标记点的配准更依赖于特定的骨标记和解剖标记。而无标记点的配准则采用表面融合原理进行轮廓匹配,以完成配准重叠,其精度相对于基于标记点的配准较为有限[6]。基于标记点的配准中2种主流的配准方法是解剖点配准(anatomical point registration,APR)和标记点配准(marker point registration,MPR)。其中U型管配准是MPR中的常用方法,但该方法在操作上相对复杂和耗时[7]。
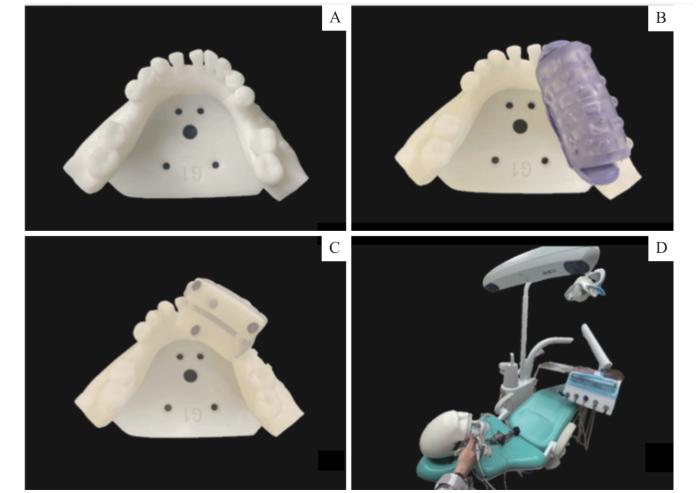
Note: A. 3D-printed mandibular model with a single posterior tooth defect. B. A model equipped with U-shaped tube registration device. C. A model equipped with two-in-one registration device. D. An active infrared implant navigation system which can track and locate mobile phones and reference plates.
Fig 3
3D-printed models and dynamic navigation system
The study was designed by XU Min, WEI Shimin, SHI Junyu, and LAI Hongchang. The study was operated by XU Min. The manuscript was drafted and revised by XU Min, WEI Shimin, SHI Junyu, and LAI Hongchang. All the authors have read the last version of paper and consented for submission.
利益冲突声明
所有作者声明不存在利益冲突。
COMPETING INTERESTS
All authors disclose no relevant conflict of interests.
BEHNEKE A, BURWINKEL M, BEHNEKE N. Factors influencing transfer accuracy of cone beam CT-derived template-based implant placement[J]. Clin Oral Implants Res, 2012, 23(4): 416-423.
WEI S M, ZHU Y, WEI J X, et al. Accuracy of dynamic navigation in implant surgery: a systematic review and meta-analysis[J]. Clin Oral Implants Res, 2021, 32(4): 383-393.
FAN S C, HUNG K, BORNSTEIN M M, et al. The effect of the configurations of fiducial markers on accuracy of surgical navigation in zygomatic implant placement: an in vitro study[J]. Int J Oral Maxillofac Implants, 2019, 34(1): 85-90.
WIDMANN G, ZANGERL A, SCHULLIAN P, et al. Do image modality and registration method influence the accuracy of craniofacial navigation?[J]. J Oral Maxillofac Surg, 2012, 70(9): 2165-2173.
MA F F, SUN F, WEI T, et al. Comparison of the accuracy of two different dynamic navigation system registration methods for dental implant placement: a retrospective study[J]. Clin Implant Dent Relat Res, 2022, 24(3): 352-360.
WEI S M, SHI J Y, QIAO S C, et al. Accuracy and primary stability of tapered or straight implants placed into fresh extraction socket using dynamic navigation: a randomized controlled clinical trial[J]. Clin Oral Investig, 2022, 26(3): 2733-2741.
WU B Z, SUN F. A registration-and-fixation approach with handpiece adjustment for dynamic navigation in dental implant surgery[J]. Heliyon, 2022, 8(9): e10565.
SIESSEGGER M, SCHNEIDER B T, MISCHKOWSKI R A, et al. Use of an image-guided navigation system in dental implant surgery in anatomically complex operation sites[J]. J Craniomaxillofac Surg, 2001, 29(5): 276-281.
EWERS R, SCHICHO K, TRUPPE M, et al. Computer-aided navigation in dental implantology: 7 years of clinical experience[J]. J Oral Maxillofac Surg, 2004, 62(3): 329-334.
DE SOUZA A B, KANG M, NEGREIROS W M, et al. A comparative retrospective study of different surgical guide designs for static computer-assisted implant surgery in posterior single edentulous sites[J]. Clin Oral Implants Res, 2022, 33(1): 45-52.
JORBA-GARCÍA A, GONZÁLEZ-BARNADAS A, CAMPS-FONT O, et al. Accuracy assessment of dynamic computer-aided implant placement: a systematic review and meta-analysis[J]. Clin Oral Investig, 2021, 25(5): 2479-2494.
WIDMANN G, STOFFNER R, SCHULLIAN P, et al. Comparison of the accuracy of invasive and noninvasive registration methods for image-guided oral implant surgery[J]. Int J Oral Maxillofac Implants, 2010, 25(3): 491-498.
GOLOB DEEB J, BENCHARIT S, CARRICO C K, et al. Exploring training dental implant placement using computer-guided implant navigation system for predoctoral students: a pilot study[J]. Eur J Dent Educ, 2019, 23(4): 415-423.
EMERY R W, MERRITT S A, LANK K, et al. Accuracy of dynamic navigation for dental implant placement-model-based evaluation[J]. J Oral Implantol, 2016, 42(5): 399-405.
JUNG R E, SCHNEIDER D, GANELES J, et al. Computer technology applications in surgical implant dentistry: a systematic review[J]. Int J Oral Maxillofac Implants, 2009, 24(Suppl): 92-109.
... 配准过程作为影响精度的关键步骤之一,分为基于标记点的配准和无标记点的配准[4-5].基于标记点的配准更依赖于特定的骨标记和解剖标记.而无标记点的配准则采用表面融合原理进行轮廓匹配,以完成配准重叠,其精度相对于基于标记点的配准较为有限[6].基于标记点的配准中2种主流的配准方法是解剖点配准(anatomical point registration,APR)和标记点配准(marker point registration,MPR).其中U型管配准是MPR中的常用方法,但该方法在操作上相对复杂和耗时[7]. ...
1
... 配准过程作为影响精度的关键步骤之一,分为基于标记点的配准和无标记点的配准[4-5].基于标记点的配准更依赖于特定的骨标记和解剖标记.而无标记点的配准则采用表面融合原理进行轮廓匹配,以完成配准重叠,其精度相对于基于标记点的配准较为有限[6].基于标记点的配准中2种主流的配准方法是解剖点配准(anatomical point registration,APR)和标记点配准(marker point registration,MPR).其中U型管配准是MPR中的常用方法,但该方法在操作上相对复杂和耗时[7]. ...
1
... 配准过程作为影响精度的关键步骤之一,分为基于标记点的配准和无标记点的配准[4-5].基于标记点的配准更依赖于特定的骨标记和解剖标记.而无标记点的配准则采用表面融合原理进行轮廓匹配,以完成配准重叠,其精度相对于基于标记点的配准较为有限[6].基于标记点的配准中2种主流的配准方法是解剖点配准(anatomical point registration,APR)和标记点配准(marker point registration,MPR).其中U型管配准是MPR中的常用方法,但该方法在操作上相对复杂和耗时[7]. ...
1
... 配准过程作为影响精度的关键步骤之一,分为基于标记点的配准和无标记点的配准[4-5].基于标记点的配准更依赖于特定的骨标记和解剖标记.而无标记点的配准则采用表面融合原理进行轮廓匹配,以完成配准重叠,其精度相对于基于标记点的配准较为有限[6].基于标记点的配准中2种主流的配准方法是解剖点配准(anatomical point registration,APR)和标记点配准(marker point registration,MPR).其中U型管配准是MPR中的常用方法,但该方法在操作上相对复杂和耗时[7]. ...



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}