Journal of Shanghai Jiao Tong University (Medical Science) ›› 2025, Vol. 45 ›› Issue (10): 1361-1371.doi: 10.3969/j.issn.1674-8115.2025.10.011
• Clinical research • Previous Articles Next Articles
DUN Yiting, ZHAO Jing, FENG Chengling, LI Xingjian, CUI Di, HAN Bangmin( )
)
Received:2025-02-13
Accepted:2025-06-06
Online:2025-10-28
Published:2025-10-28
Contact:
HAN Bangmin
E-mail:Hanbm@163.com
Supported by:CLC Number:
DUN Yiting, ZHAO Jing, FENG Chengling, LI Xingjian, CUI Di, HAN Bangmin. Online risk calculator and nomogram prediction model for urinary incontinence after robot-assisted laparoscopic radical prostatectomy[J]. Journal of Shanghai Jiao Tong University (Medical Science), 2025, 45(10): 1361-1371.
Add to citation manager EndNote|Ris|BibTeX
URL: https://xuebao.shsmu.edu.cn/EN/10.3969/j.issn.1674-8115.2025.10.011
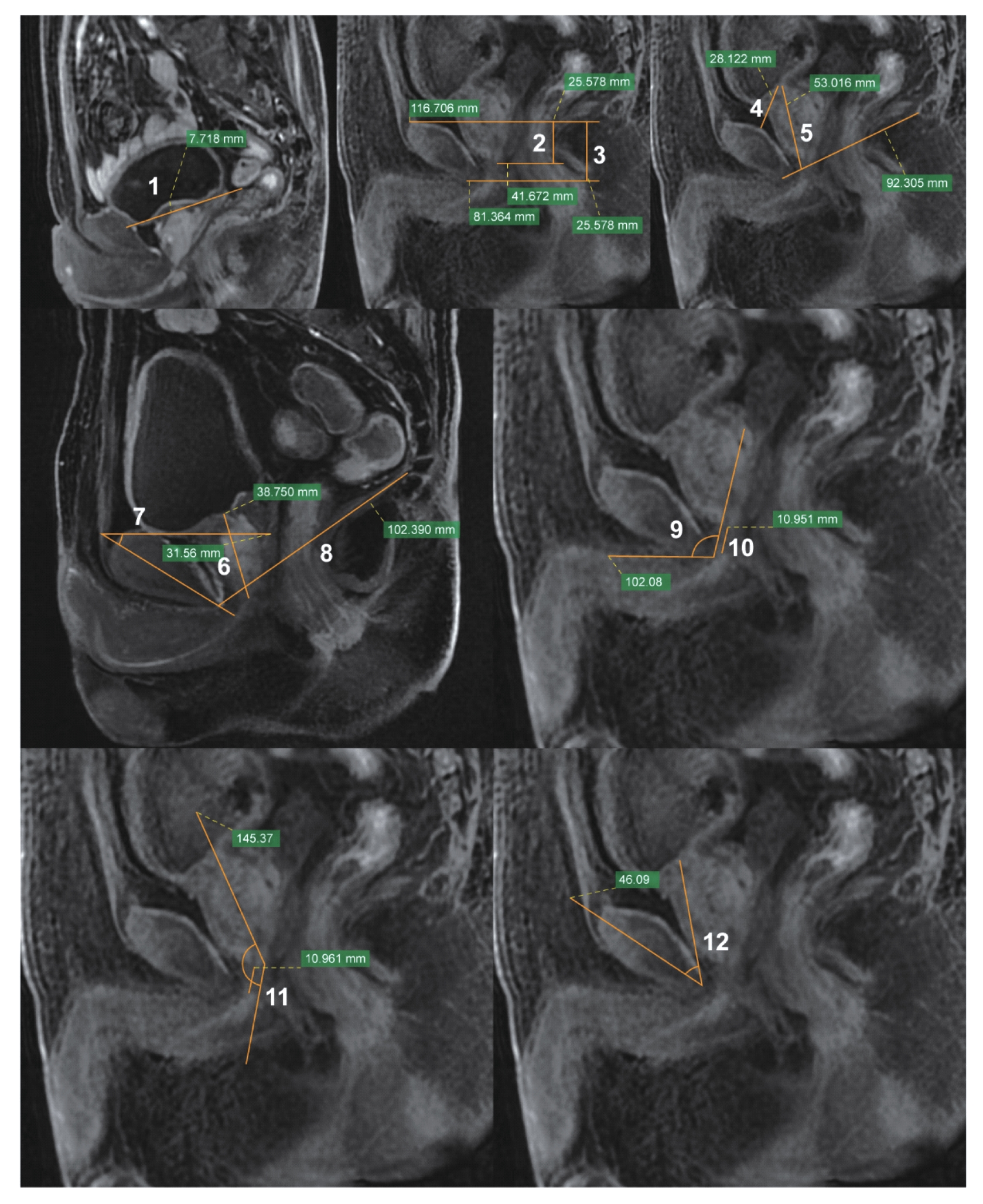
Fig 1 MRI mid-sagittal image
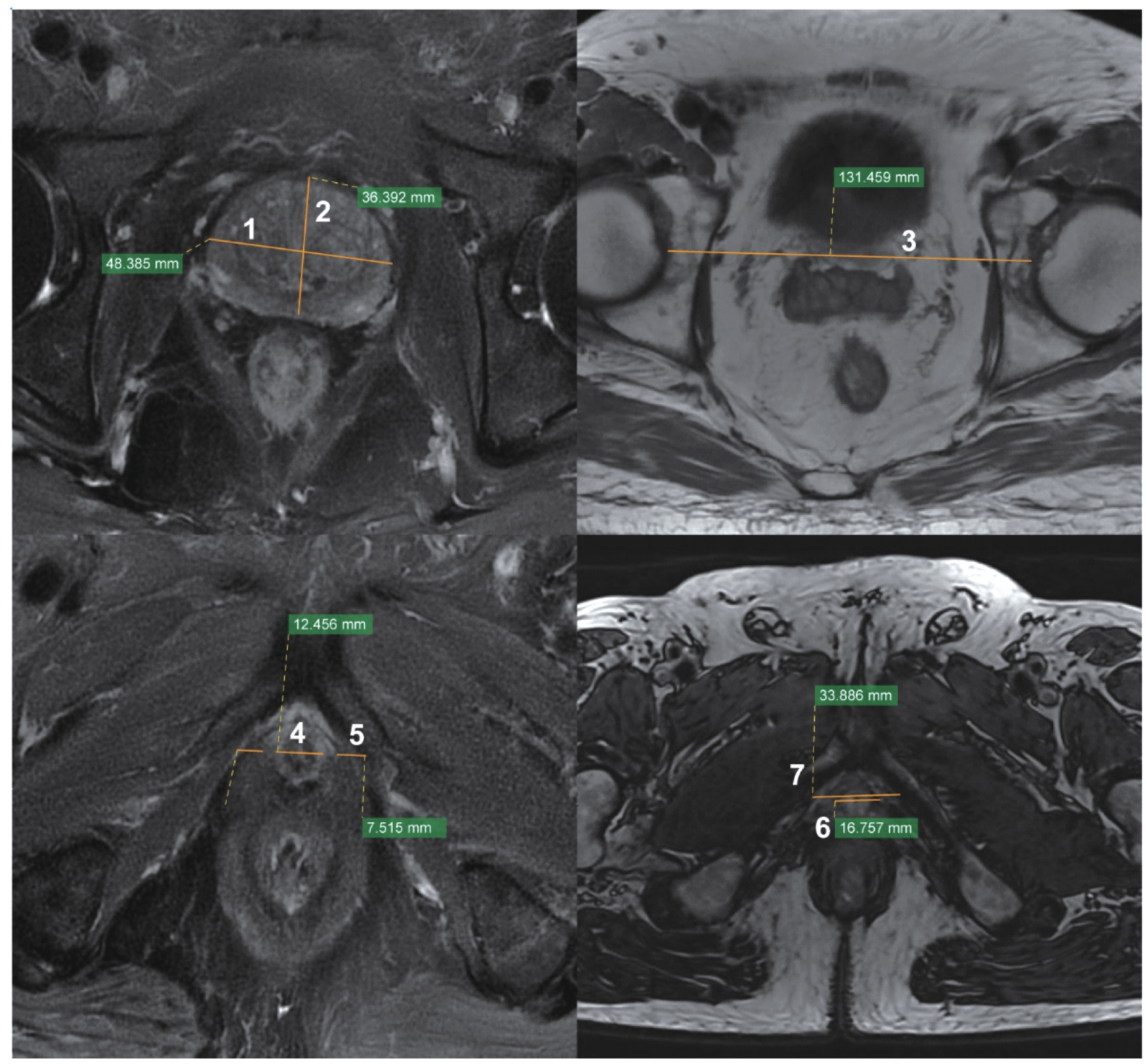
Fig 2 MRI axial image
| Item | Total (n=604) | Training set (n=420) | Validation set (n=184) | P value |
|---|---|---|---|---|
| IPPL/mm | 0 (0, 7.21) | 0 (0, 7.28) | 0 (0, 5.29) | 0.800 |
| Prostatic apex shape/n(%) | 0.950 | |||
| Type A | 264 (43.71) | 180 (42.86) | 84 (45.65) | |
| Type B | 108 (17.88) | 76 (18.10) | 32 (17.39) | |
| Type D | 232 (38.41) | 164 (39.05) | 68 (36.96) | |
| Prostate apical depth/mm | 29.53 ± 5.65 | 29.57 ± 5.73 | 29.44 ± 5.53 | 0.895 |
| Pubic height/mm | 35.21 (32.81, 38.04) | 35.24 (33.04, 37.91) | 34.89 (32.65, 38.05) | 0.867 |
| Pubic symphysis to bladder neck distance/mm | 24.86 (22.18, 28.43) | 24.63 (22.13, 28.64) | 25.09 (22.51, 28.36) | 0.824 |
| Distance between the bladder neck and the pubococcygeous line/mm | 40.03 (35.37, 44.75) | 39.39 (35.35, 44.58) | 41.41 (36.5, 45.85) | 0.403 |
| Maximum prostate height/mm | 42.28 (37.92, 47.03) | 42.20 (37.38, 46.72) | 43.20 (38.18, 48.63) | 0.615 |
| Anteroposterior diameter of the middle pelvic plane/mm | 103.91±7.94 | 103.14±8.20 | 105.66±7.08 | 0.058 |
| Pubic symphysis angle/(°) | 33.63±5.30 | 33.62±5.32 | 33.64±5.32 | 0.978 |
| Membranous urethra angle/(°) | 115.70±7.89 | 116.12±8.08 | 114.73±7.45 | 0.305 |
| MUL/mm | 9.06 (6.54, 11.50) | 9.36 (6.70, 11.75) | 8.10 (6.23, 10.61) | 0.136 |
| Angle between membranous urethra and prostatic axis/(°) | 133.13 (127.26, 137.84) | 133.33 (126.42, 138.16) | 131.60 (128.39, 137.12) | 0.698 |
| Pubourethral angle/(°) | 60.62±8.73 | 60.86±8.86 | 60.08 ± 8.51 | 0.606 |
| Maximum prostate width/mm | 50.35 (45.99, 53.64) | 50.53 (45.99, 53.35) | 50.31 (46.01, 54.29) | 0.824 |
| Maximum prostate length/mm | 37.70 (33.41, 42.75) | 37.94 (33.48, 42.90) | 37.20 (33.17, 41.76) | 0.816 |
| Femoral bone width/mm | 117.44 ± 6.57 | 117.76 ± 6.90 | 116.72 ± 5.76 | 0.341 |
| Urethral wall thickness/mm | 16.99 (14.39, 19.43) | 17.14 (15.23, 19.39) | 16.37 (11.77, 19.73) | 0.350 |
| Left levator ani muscle thickness/mm | 20.13 (16.10, 22.22) | 20.58 (16.96, 22.39) | 19.27 (14.16, 21.96) | 0.134 |
| Right levator ani muscle thickness/mm | 19.91 (16.48, 21.73) | 20.11 (16.62, 21.89) | 18.91 (14.40, 21.40) | 0.216 |
| Average thickness of the levator ani muscle/mm | 20.08 (16.14, 21.99) | 20.27 (16.75, 22.11) | 19.12 (14.05, 21.76) | 0.176 |
| External distance of the levator ani muscle/mm | 55.87 (50.07, 60.86) | 56.61 (51.95, 61.44) | 54.49 (45.65, 59.66) | 0.128 |
| Age at surgery/year | 70 (67, 75) | 71 (67, 75) | 70 (68, 74) | 0.849 |
| Height/cm | 170.00 (167.00, 173.00) | 170.00 (166.00, 173.00) | 170.00 (167.62, 172.75) | 0.617 |
| Weight/kg | 70.00 (65.00, 74.95) | 70.00 (65.00, 75.00) | 68.00 (65.00, 71.88) | 0.232 |
| BMI/(kg·m-2) | 24.18±2.47 | 24.32±2.56 | 23.87±2.23 | 0.284 |
| Preoperative highest PSA/(ng·mL-1) | 10.70 (7.91, 17.00) | 11.10 (7.73, 17.00) | 10.70 (8.00, 16.85) | 0.832 |
| History of endocrine therapy/n(%) | 0.993 | |||
| No | 532 (88.08) | 372 (88.57) | 160 (86.96) | |
| Yes | 72 (11.92) | 48 (11.43) | 24 (13.04) | |
| DVC/n(%) | 0.647 | |||
| Suture | 520 (86.09) | 356 (84.76) | 164 (89.13) | |
| Preservation | 84 (13.91) | 64 (15.24) | 20 (10.87) | |
| NVB/n(%) | >0.999 | |||
| Bilateral extrafascial | 484 (80.13) | 336 (80.00) | 148 (80.43) | |
| Other ways | 120 (19.87) | 84 (20.00) | 36 (19.57) | |
| Modified anterior approach/n(%) | >0.999 | |||
| No | 592 (98.01) | 412 (98.10) | 180 (97.83) | |
| Yes | 12 (1.99) | 8 (1.90) | 4 (2.17) | |
| Reconstruction/n(%) | 0.726 | |||
| No | 388 (64.24) | 264 (62.86) | 124 (67.39) | |
| Yes | 216 (35.76) | 156 (37.14) | 60 (32.61) | |
| APA/n (%) | 0.553 | |||
| Preservation | 592 (98.01) | 408 (97.14) | 184 (100.00) | |
| Non-reservation | 12 (1.99) | 12 (2.86) | 0 (0) | |
| Lymph node dissection/n(%) | >0.999 | |||
| No | 516 (85.43) | 360 (85.71) | 156 (84.78) | |
| Yes | 88 (14.57) | 60 (14.29) | 28 (15.22) | |
| Intraoperative blood loss/mL | 50 (35, 100) | 50 (50, 100) | 50 (30, 80) | 0.434 |
| Gleason score/n(%) | 0.649 | |||
| 6 | 64 (10.60) | 52 (12.38) | 12 (6.52) | |
| 7 | 364 (60.26) | 240 (57.14) | 124 (67.39) | |
| 8 | 52 (8.61) | 40 (9.52) | 12 (6.52) | |
| 9 | 124 (20.53) | 88 (20.95) | 36 (19.57) | |
| Tumor status of the apex margin/n(%) | 0.659 | |||
| Negative | 492 (81.46) | 348 (82.86) | 144 (78.26) | |
| Positive | 112 (18.54) | 72 (17.14) | 40 (21.74) | |
| Prostate volume/mm3 | 36.40 (25.73, 46.80) | 36.40 (26.75, 46.21) | 36.40 (24.52, 51.09) | 0.984 |
| Three-month postoperative urinary control/n(%) | 0.408 | |||
| Continence | 352 (58.28) | 256 (60.95) | 96 (52.17) | |
| Incontinence | 252 (41.72) | 164 (39.05) | 88 (47.83) | |
Tab 1 Baseline characteristics of patients in the training and validation sets
| Item | Total (n=604) | Training set (n=420) | Validation set (n=184) | P value |
|---|---|---|---|---|
| IPPL/mm | 0 (0, 7.21) | 0 (0, 7.28) | 0 (0, 5.29) | 0.800 |
| Prostatic apex shape/n(%) | 0.950 | |||
| Type A | 264 (43.71) | 180 (42.86) | 84 (45.65) | |
| Type B | 108 (17.88) | 76 (18.10) | 32 (17.39) | |
| Type D | 232 (38.41) | 164 (39.05) | 68 (36.96) | |
| Prostate apical depth/mm | 29.53 ± 5.65 | 29.57 ± 5.73 | 29.44 ± 5.53 | 0.895 |
| Pubic height/mm | 35.21 (32.81, 38.04) | 35.24 (33.04, 37.91) | 34.89 (32.65, 38.05) | 0.867 |
| Pubic symphysis to bladder neck distance/mm | 24.86 (22.18, 28.43) | 24.63 (22.13, 28.64) | 25.09 (22.51, 28.36) | 0.824 |
| Distance between the bladder neck and the pubococcygeous line/mm | 40.03 (35.37, 44.75) | 39.39 (35.35, 44.58) | 41.41 (36.5, 45.85) | 0.403 |
| Maximum prostate height/mm | 42.28 (37.92, 47.03) | 42.20 (37.38, 46.72) | 43.20 (38.18, 48.63) | 0.615 |
| Anteroposterior diameter of the middle pelvic plane/mm | 103.91±7.94 | 103.14±8.20 | 105.66±7.08 | 0.058 |
| Pubic symphysis angle/(°) | 33.63±5.30 | 33.62±5.32 | 33.64±5.32 | 0.978 |
| Membranous urethra angle/(°) | 115.70±7.89 | 116.12±8.08 | 114.73±7.45 | 0.305 |
| MUL/mm | 9.06 (6.54, 11.50) | 9.36 (6.70, 11.75) | 8.10 (6.23, 10.61) | 0.136 |
| Angle between membranous urethra and prostatic axis/(°) | 133.13 (127.26, 137.84) | 133.33 (126.42, 138.16) | 131.60 (128.39, 137.12) | 0.698 |
| Pubourethral angle/(°) | 60.62±8.73 | 60.86±8.86 | 60.08 ± 8.51 | 0.606 |
| Maximum prostate width/mm | 50.35 (45.99, 53.64) | 50.53 (45.99, 53.35) | 50.31 (46.01, 54.29) | 0.824 |
| Maximum prostate length/mm | 37.70 (33.41, 42.75) | 37.94 (33.48, 42.90) | 37.20 (33.17, 41.76) | 0.816 |
| Femoral bone width/mm | 117.44 ± 6.57 | 117.76 ± 6.90 | 116.72 ± 5.76 | 0.341 |
| Urethral wall thickness/mm | 16.99 (14.39, 19.43) | 17.14 (15.23, 19.39) | 16.37 (11.77, 19.73) | 0.350 |
| Left levator ani muscle thickness/mm | 20.13 (16.10, 22.22) | 20.58 (16.96, 22.39) | 19.27 (14.16, 21.96) | 0.134 |
| Right levator ani muscle thickness/mm | 19.91 (16.48, 21.73) | 20.11 (16.62, 21.89) | 18.91 (14.40, 21.40) | 0.216 |
| Average thickness of the levator ani muscle/mm | 20.08 (16.14, 21.99) | 20.27 (16.75, 22.11) | 19.12 (14.05, 21.76) | 0.176 |
| External distance of the levator ani muscle/mm | 55.87 (50.07, 60.86) | 56.61 (51.95, 61.44) | 54.49 (45.65, 59.66) | 0.128 |
| Age at surgery/year | 70 (67, 75) | 71 (67, 75) | 70 (68, 74) | 0.849 |
| Height/cm | 170.00 (167.00, 173.00) | 170.00 (166.00, 173.00) | 170.00 (167.62, 172.75) | 0.617 |
| Weight/kg | 70.00 (65.00, 74.95) | 70.00 (65.00, 75.00) | 68.00 (65.00, 71.88) | 0.232 |
| BMI/(kg·m-2) | 24.18±2.47 | 24.32±2.56 | 23.87±2.23 | 0.284 |
| Preoperative highest PSA/(ng·mL-1) | 10.70 (7.91, 17.00) | 11.10 (7.73, 17.00) | 10.70 (8.00, 16.85) | 0.832 |
| History of endocrine therapy/n(%) | 0.993 | |||
| No | 532 (88.08) | 372 (88.57) | 160 (86.96) | |
| Yes | 72 (11.92) | 48 (11.43) | 24 (13.04) | |
| DVC/n(%) | 0.647 | |||
| Suture | 520 (86.09) | 356 (84.76) | 164 (89.13) | |
| Preservation | 84 (13.91) | 64 (15.24) | 20 (10.87) | |
| NVB/n(%) | >0.999 | |||
| Bilateral extrafascial | 484 (80.13) | 336 (80.00) | 148 (80.43) | |
| Other ways | 120 (19.87) | 84 (20.00) | 36 (19.57) | |
| Modified anterior approach/n(%) | >0.999 | |||
| No | 592 (98.01) | 412 (98.10) | 180 (97.83) | |
| Yes | 12 (1.99) | 8 (1.90) | 4 (2.17) | |
| Reconstruction/n(%) | 0.726 | |||
| No | 388 (64.24) | 264 (62.86) | 124 (67.39) | |
| Yes | 216 (35.76) | 156 (37.14) | 60 (32.61) | |
| APA/n (%) | 0.553 | |||
| Preservation | 592 (98.01) | 408 (97.14) | 184 (100.00) | |
| Non-reservation | 12 (1.99) | 12 (2.86) | 0 (0) | |
| Lymph node dissection/n(%) | >0.999 | |||
| No | 516 (85.43) | 360 (85.71) | 156 (84.78) | |
| Yes | 88 (14.57) | 60 (14.29) | 28 (15.22) | |
| Intraoperative blood loss/mL | 50 (35, 100) | 50 (50, 100) | 50 (30, 80) | 0.434 |
| Gleason score/n(%) | 0.649 | |||
| 6 | 64 (10.60) | 52 (12.38) | 12 (6.52) | |
| 7 | 364 (60.26) | 240 (57.14) | 124 (67.39) | |
| 8 | 52 (8.61) | 40 (9.52) | 12 (6.52) | |
| 9 | 124 (20.53) | 88 (20.95) | 36 (19.57) | |
| Tumor status of the apex margin/n(%) | 0.659 | |||
| Negative | 492 (81.46) | 348 (82.86) | 144 (78.26) | |
| Positive | 112 (18.54) | 72 (17.14) | 40 (21.74) | |
| Prostate volume/mm3 | 36.40 (25.73, 46.80) | 36.40 (26.75, 46.21) | 36.40 (24.52, 51.09) | 0.984 |
| Three-month postoperative urinary control/n(%) | 0.408 | |||
| Continence | 352 (58.28) | 256 (60.95) | 96 (52.17) | |
| Incontinence | 252 (41.72) | 164 (39.05) | 88 (47.83) | |
| Item | Continence (n=256) | Incontinence (n=164) | P value |
|---|---|---|---|
| IPPL/mm | 0 (0, 5.68) | 0 (0, 8.21) | 0.131 |
| Prostatic apex shape/n(%) | <0.001 | ||
| Type A | 52 (20.31) | 128 (78.05) | |
| Type B | 56 (21.88) | 20 (12.19) | |
| Type D | 148 (57.81) | 16 (9.76) | |
| Prostate apical depth/mm | 28.63±5.27 | 31.03±6.17 | 0.044 |
| Pubic height/mm | 35.3±3.36 | 35.64±4.30 | 0.667 |
| Pubic symphysis to bladder neck distance/mm | 24.30 (22.20, 28.00) | 25.27 (22.03, 29.93) | 0.395 |
| Distance between the bladder neck and the pubococcygeous line/mm | 39.10 (34.91, 43.24) | 41.46 (35.38, 45.39) | 0.329 |
| Maximum prostate height/mm | 39.55 (36.93, 46.39) | 45.15 (39.94, 50.65) | 0.011 |
| Anteroposterior diameter of the middle pelvic plane/mm | 103.48±7.48 | 102.61±9.30 | 0.618 |
| Pubic symphysis angle/(°) | 32.98±5.39 | 34.61±5.11 | 0.122 |
| Membranous urethra angle/(°) | 115.46±7.64 | 117.15 ± 8.72 | 0.312 |
| MUL/mm | 11.09 (9.42, 13.40) | 6.53 (6.04, 7.72) | < 0.001 |
| Angle between membranous urethra and prostatic axis/(°) | 132.55±9.69 | 133.80±9.51 | 0.517 |
| Pubourethral angle/(°) | 60.20±8.50 | 61.90±9.39 | 0.353 |
| Maximum prostate width/mm | 49.44 (44.75, 51.52) | 52.68 (49.38, 58.13) | < 0.001 |
| Maximum prostate length/mm | 36.50±7.12 | 41.56±7.02 | < 0.001 |
| Femoral bone width/mm | 118.99 (113.90, 121.32) | 116.69 (110.64, 120.89) | 0.051 |
| Urethral wall thickness/mm | 17.66±2.29 | 15.60±4.40 | 0.008 |
| Left levator ani muscle thickness/mm | 21.69 (20.39, 23.34) | 15.06 (12.82, 19.59) | < 0.001 |
| Right levator ani muscle thickness/mm | 21.42 (20.25, 22.82) | 15.36 (12.65, 17.84) | < 0.001 |
| Average thickness of the levator ani muscle/mm | 21.43 (20.29, 23.40) | 15.74 (12.37, 18.95) | < 0.001 |
| External distance of the levator ani muscle/mm | 58.52 (55.75, 62.95) | 50.80 (42.62, 55.50) | < 0.001 |
| Age at surgery/year | 70 (68, 75) | 71 (66, 75) | 0.911 |
| Height/cm | 170 (167, 174) | 170 (165, 173) | 0.280 |
| Weight/kg | 69.98±8.79 | 70.01±6.22 | 0.984 |
| BMI/(kg·m-2) | 24.17±2.88 | 24.54±1.99 | 0.440 |
| Preoperative highest PSA/(ng·mL-1) | 10.90 (7.73, 17.19) | 11.33 (8.20, 16.66) | 0.765 |
| History of endocrine therapy/n(%) | 0.761 | ||
| No | 224 (87.50) | 148 (90.24) | |
| Yes | 32 (12.50) | 16 (9.76) | |
| DVC/n(%) | 0.126 | ||
| Suture | 204 (79.69) | 152 (92.68) | |
| Preservation | 52 (20.31) | 12 (7.32) | |
| NVB/n(%) | 0.881 | ||
| Bilateral extrafascial | 208 (81.25) | 128 (78.05) | |
| Other ways | 48 (18.75) | 36 (21.95) | |
| Modified anterior approach/n(%) | >0.999 | ||
| No | 252 (98.44) | 160 (97.56) | |
| Yes | 4 (1.56) | 4 (2.44) | |
| Reconstruction/n(%) | >0.999 | ||
| No | 160 (62.50) | 104 (63.41) | |
| Yes | 96 (37.50) | 60 (36.59) | |
| APA/n(%) | 0.279 | ||
| Preservation | 244 (95.31) | 164 (100.00) | |
| Non-reservation | 12 (4.69) | 0 (0) | |
| Lymph node dissection/n(%) | 0.713 | ||
| No | 224 (87.50) | 136 (82.93) | |
| Yes | 32 (12.50) | 28 (17.07) | |
| Intraoperative blood loss/mL | 50 (30, 80) | 80 (50, 100) | 0.003 |
| Gleason score/n(%) | 0.624 | ||
| 6 | 28 (10.94) | 24 (14.63) | |
| 7 | 144 (56.25) | 96 (58.54) | |
| 8 | 32 (12.50) | 8 (4.88) | |
| 9 | 52 (20.31) | 36 (21.95) | |
| Tumor status of the apex margin/n(%) | 0.802 | ||
| Negative | 216 (84.38) | 132 (80.49) | |
| Positive | 40 (15.62) | 32 (19.51) | |
| Prostate volume/mm3 | 36.40 (24.86, 47.33) | 37.44 (28.67, 43.68) | 0.517 |
Tab 2 Univariate analysis of early postoperative urinary incontinence in the training set
| Item | Continence (n=256) | Incontinence (n=164) | P value |
|---|---|---|---|
| IPPL/mm | 0 (0, 5.68) | 0 (0, 8.21) | 0.131 |
| Prostatic apex shape/n(%) | <0.001 | ||
| Type A | 52 (20.31) | 128 (78.05) | |
| Type B | 56 (21.88) | 20 (12.19) | |
| Type D | 148 (57.81) | 16 (9.76) | |
| Prostate apical depth/mm | 28.63±5.27 | 31.03±6.17 | 0.044 |
| Pubic height/mm | 35.3±3.36 | 35.64±4.30 | 0.667 |
| Pubic symphysis to bladder neck distance/mm | 24.30 (22.20, 28.00) | 25.27 (22.03, 29.93) | 0.395 |
| Distance between the bladder neck and the pubococcygeous line/mm | 39.10 (34.91, 43.24) | 41.46 (35.38, 45.39) | 0.329 |
| Maximum prostate height/mm | 39.55 (36.93, 46.39) | 45.15 (39.94, 50.65) | 0.011 |
| Anteroposterior diameter of the middle pelvic plane/mm | 103.48±7.48 | 102.61±9.30 | 0.618 |
| Pubic symphysis angle/(°) | 32.98±5.39 | 34.61±5.11 | 0.122 |
| Membranous urethra angle/(°) | 115.46±7.64 | 117.15 ± 8.72 | 0.312 |
| MUL/mm | 11.09 (9.42, 13.40) | 6.53 (6.04, 7.72) | < 0.001 |
| Angle between membranous urethra and prostatic axis/(°) | 132.55±9.69 | 133.80±9.51 | 0.517 |
| Pubourethral angle/(°) | 60.20±8.50 | 61.90±9.39 | 0.353 |
| Maximum prostate width/mm | 49.44 (44.75, 51.52) | 52.68 (49.38, 58.13) | < 0.001 |
| Maximum prostate length/mm | 36.50±7.12 | 41.56±7.02 | < 0.001 |
| Femoral bone width/mm | 118.99 (113.90, 121.32) | 116.69 (110.64, 120.89) | 0.051 |
| Urethral wall thickness/mm | 17.66±2.29 | 15.60±4.40 | 0.008 |
| Left levator ani muscle thickness/mm | 21.69 (20.39, 23.34) | 15.06 (12.82, 19.59) | < 0.001 |
| Right levator ani muscle thickness/mm | 21.42 (20.25, 22.82) | 15.36 (12.65, 17.84) | < 0.001 |
| Average thickness of the levator ani muscle/mm | 21.43 (20.29, 23.40) | 15.74 (12.37, 18.95) | < 0.001 |
| External distance of the levator ani muscle/mm | 58.52 (55.75, 62.95) | 50.80 (42.62, 55.50) | < 0.001 |
| Age at surgery/year | 70 (68, 75) | 71 (66, 75) | 0.911 |
| Height/cm | 170 (167, 174) | 170 (165, 173) | 0.280 |
| Weight/kg | 69.98±8.79 | 70.01±6.22 | 0.984 |
| BMI/(kg·m-2) | 24.17±2.88 | 24.54±1.99 | 0.440 |
| Preoperative highest PSA/(ng·mL-1) | 10.90 (7.73, 17.19) | 11.33 (8.20, 16.66) | 0.765 |
| History of endocrine therapy/n(%) | 0.761 | ||
| No | 224 (87.50) | 148 (90.24) | |
| Yes | 32 (12.50) | 16 (9.76) | |
| DVC/n(%) | 0.126 | ||
| Suture | 204 (79.69) | 152 (92.68) | |
| Preservation | 52 (20.31) | 12 (7.32) | |
| NVB/n(%) | 0.881 | ||
| Bilateral extrafascial | 208 (81.25) | 128 (78.05) | |
| Other ways | 48 (18.75) | 36 (21.95) | |
| Modified anterior approach/n(%) | >0.999 | ||
| No | 252 (98.44) | 160 (97.56) | |
| Yes | 4 (1.56) | 4 (2.44) | |
| Reconstruction/n(%) | >0.999 | ||
| No | 160 (62.50) | 104 (63.41) | |
| Yes | 96 (37.50) | 60 (36.59) | |
| APA/n(%) | 0.279 | ||
| Preservation | 244 (95.31) | 164 (100.00) | |
| Non-reservation | 12 (4.69) | 0 (0) | |
| Lymph node dissection/n(%) | 0.713 | ||
| No | 224 (87.50) | 136 (82.93) | |
| Yes | 32 (12.50) | 28 (17.07) | |
| Intraoperative blood loss/mL | 50 (30, 80) | 80 (50, 100) | 0.003 |
| Gleason score/n(%) | 0.624 | ||
| 6 | 28 (10.94) | 24 (14.63) | |
| 7 | 144 (56.25) | 96 (58.54) | |
| 8 | 32 (12.50) | 8 (4.88) | |
| 9 | 52 (20.31) | 36 (21.95) | |
| Tumor status of the apex margin/n(%) | 0.802 | ||
| Negative | 216 (84.38) | 132 (80.49) | |
| Positive | 40 (15.62) | 32 (19.51) | |
| Prostate volume/mm3 | 36.40 (24.86, 47.33) | 37.44 (28.67, 43.68) | 0.517 |
| Item | Log λ |
|---|---|
| Prostatic apex shape | -0.519 |
| Prostate apical depth | 0 |
| Maximum prostate height | 0.043 |
| MUL | -0.343 |
| Maximum prostate width | 0 |
| Maximum prostate length | 0.031 |
| Urethral wall thickness | 0 |
| Left levator ani muscle thickness | 0 |
| Right levator ani muscle thickness | -0.486 |
| Average thickness of the levator ani muscle | 0 |
| External distance of the levator ani muscle | 0 |
| Intraoperative blood loss | 0.014 |
Tab 3 Predictor selection based on LASSO regression
| Item | Log λ |
|---|---|
| Prostatic apex shape | -0.519 |
| Prostate apical depth | 0 |
| Maximum prostate height | 0.043 |
| MUL | -0.343 |
| Maximum prostate width | 0 |
| Maximum prostate length | 0.031 |
| Urethral wall thickness | 0 |
| Left levator ani muscle thickness | 0 |
| Right levator ani muscle thickness | -0.486 |
| Average thickness of the levator ani muscle | 0 |
| External distance of the levator ani muscle | 0 |
| Intraoperative blood loss | 0.014 |
| Item | Coef | S.E. | Z value | P value |
|---|---|---|---|---|
| Prostatic apex shape type B | -2.296 | 1.340 | -1.710 | 0.087 |
| Prostatic apex shape type D | -0.845 | 1.299 | -0.650 | 0.515 |
| Maximum prostate height | 0.153 | 0.108 | 1.420 | 0.156 |
| MUL | -0.523 | 0.258 | -2.020 | 0.043 |
| Maximum prostate length | 0.015 | 0.099 | 0.150 | 0.878 |
| Right levator ani muscle thickness | -0.756 | 0.234 | -3.230 | 0.001 |
| Intraoperative blood loss | 0.027 | 0.013 | 2.110 | 0.035 |
Tab 4 Multivariate Logistic regression analysis of early postoperative urinary incontinence
| Item | Coef | S.E. | Z value | P value |
|---|---|---|---|---|
| Prostatic apex shape type B | -2.296 | 1.340 | -1.710 | 0.087 |
| Prostatic apex shape type D | -0.845 | 1.299 | -0.650 | 0.515 |
| Maximum prostate height | 0.153 | 0.108 | 1.420 | 0.156 |
| MUL | -0.523 | 0.258 | -2.020 | 0.043 |
| Maximum prostate length | 0.015 | 0.099 | 0.150 | 0.878 |
| Right levator ani muscle thickness | -0.756 | 0.234 | -3.230 | 0.001 |
| Intraoperative blood loss | 0.027 | 0.013 | 2.110 | 0.035 |
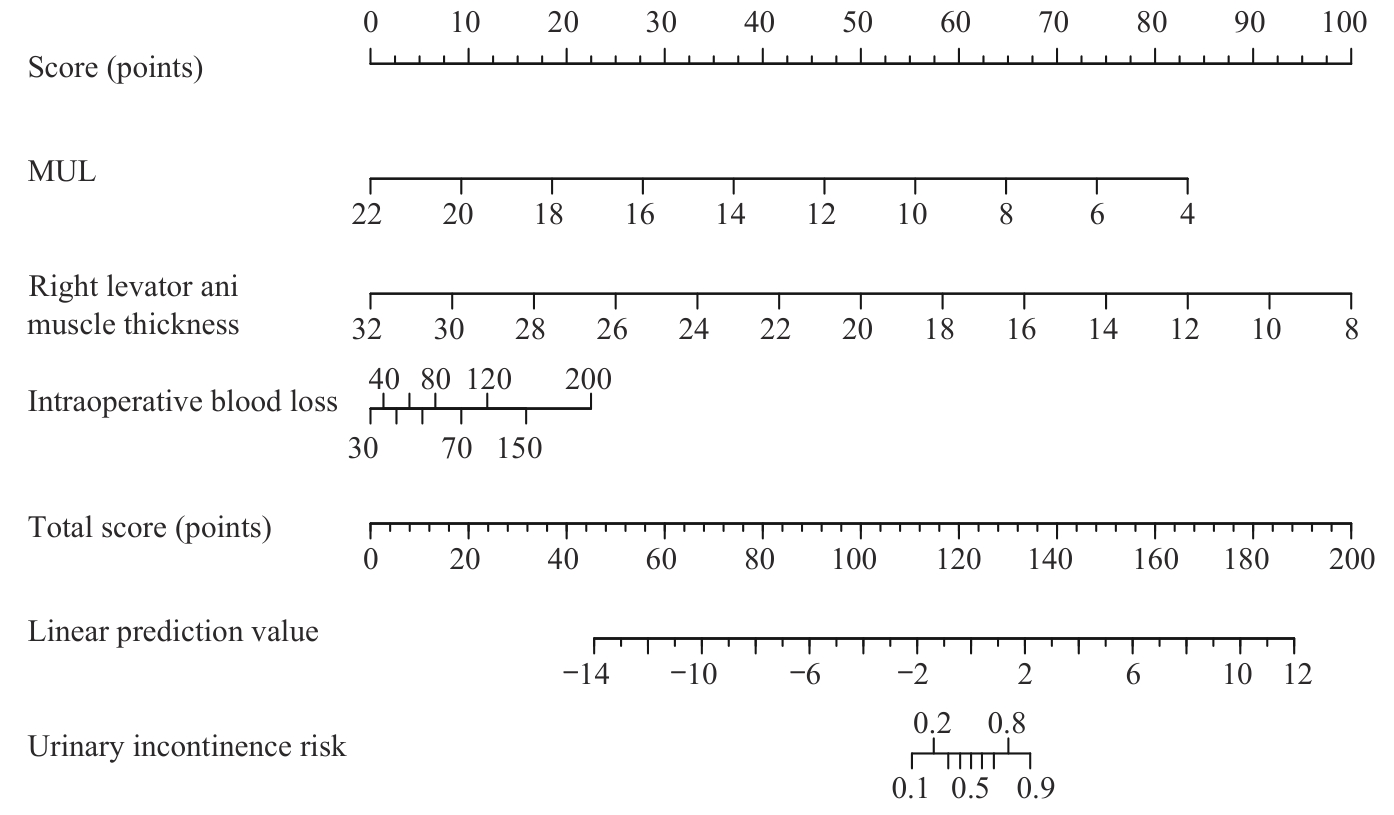
Fig 3 Nomogram of prediction model for urinary incontinence at 3 months after RARP
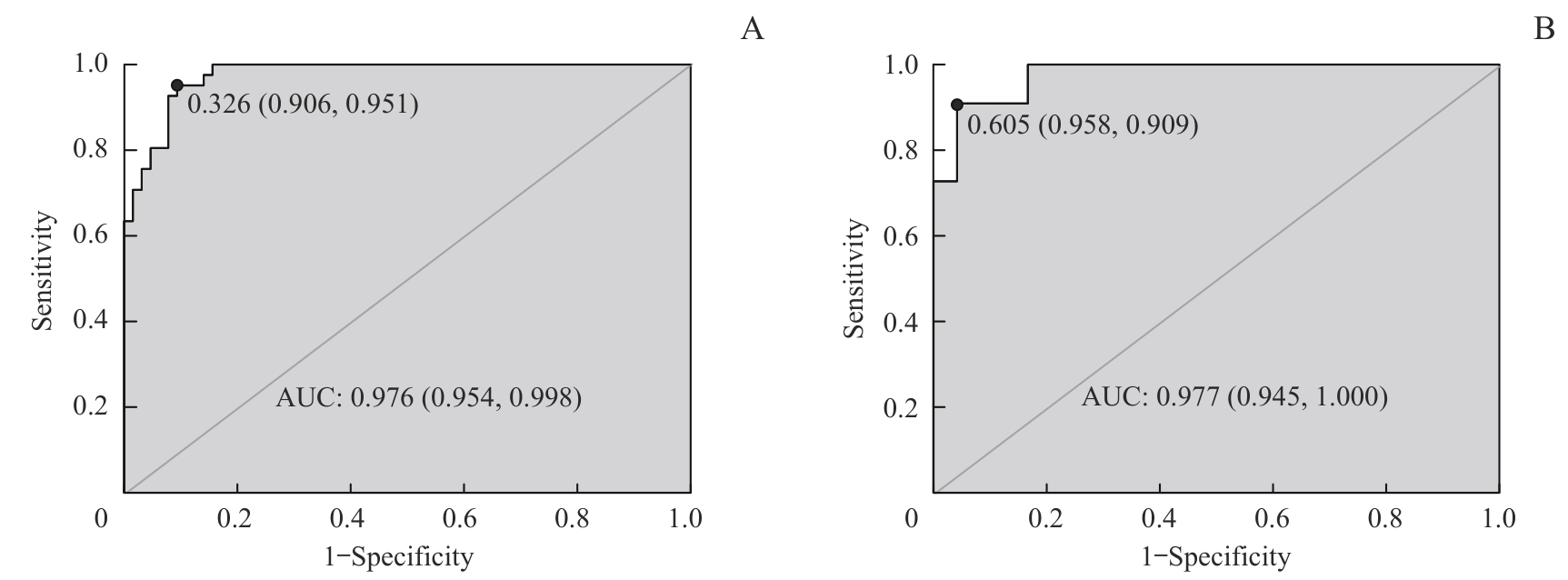
Fig 4 ROC curves of the training set (A) and the validation set (B)
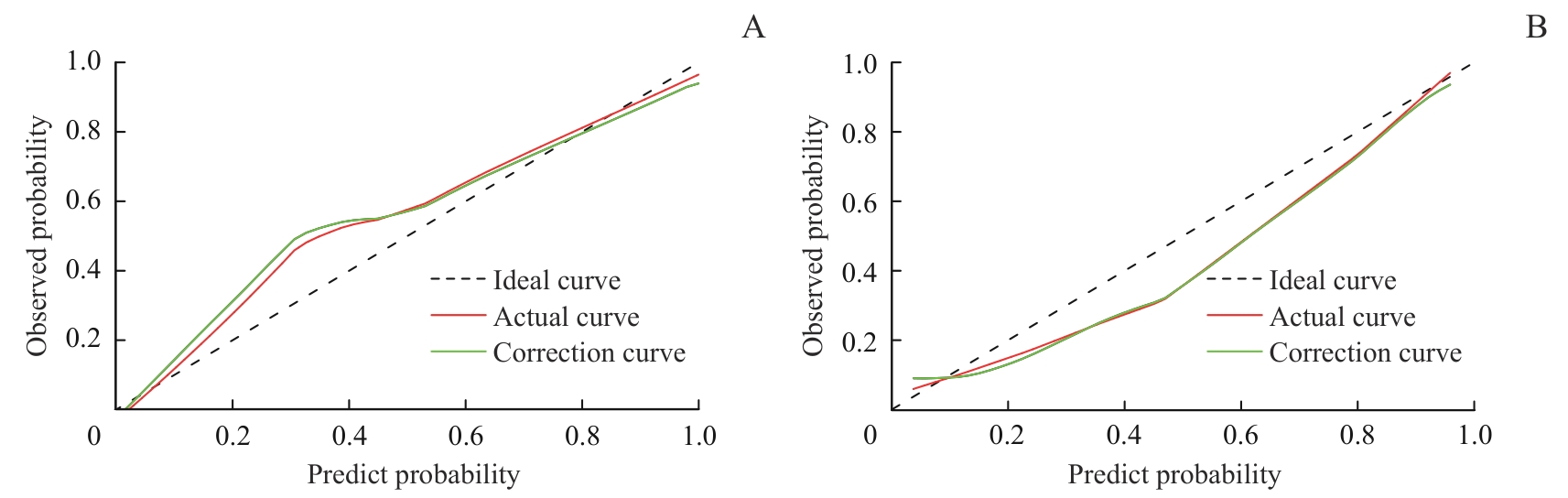
Fig 5 Calibration curves for the training set (A) and the validation set (B)
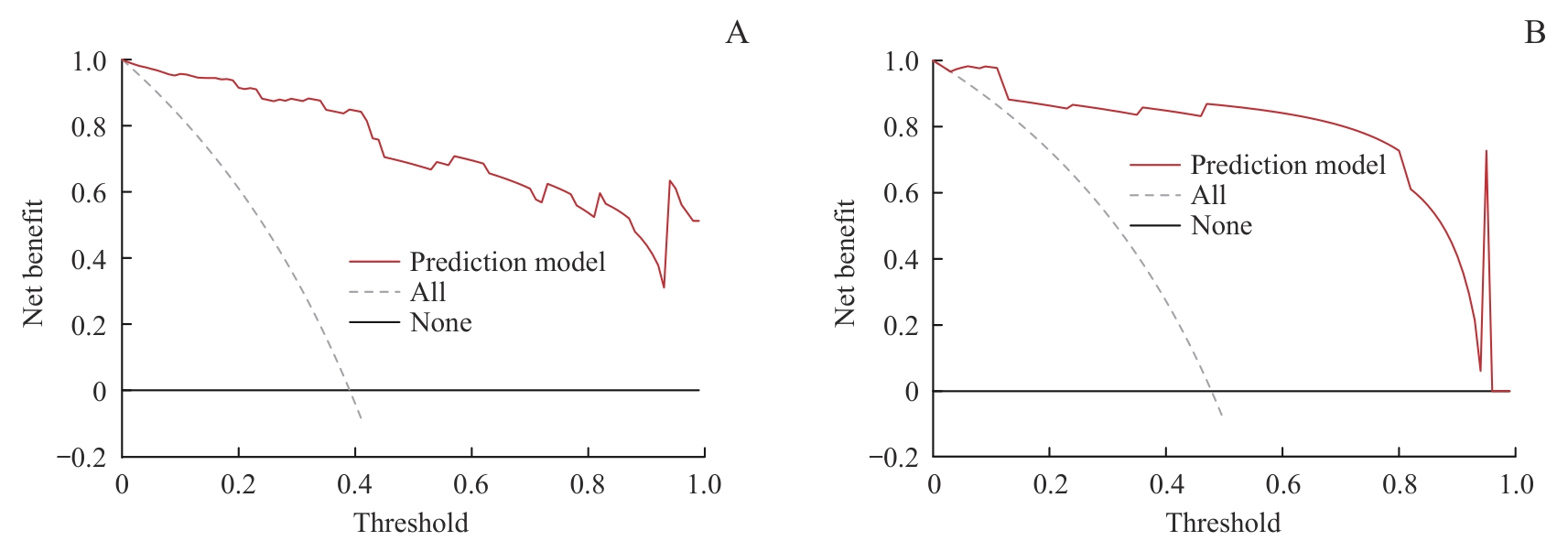
Fig 6 Clinical decision curves for the training set (A) and validation set (B)
| [1] | DIAO X Y, GUO C, JIN Y K, et al. Cancer situation in China: an analysis based on the global epidemiological data released in 2024[J]. Cancer Commun (Lond), 2025, 45(2): 178-197. |
| [2] | RUAN X H, STACIA CHUN T T, HUANG D, et al. Outcomes of radical prostatectomy in a 20-year localized prostate cancer single institution series in China[J]. Asian J Androl, 2023, 25(3): 345-349. |
| [3] | COSTELLO A J. Considering the role of radical prostatectomy in 21st century prostate cancer care[J]. Nat Rev Urol, 2020, 17(3): 177-188. |
| [4] | FICARRA V, NOVARA G, ARTIBANI W, et al. Retropubic, laparoscopic, and robot-assisted radical prostatectomy: a systematic review and cumulative analysis of comparative studies[J]. Eur Urol, 2009, 55(5): 1037-1063. |
| [5] | WALZ J, EPSTEIN J I, GANZER R, et al. A critical analysis of the current knowledge of surgical anatomy of the prostate related to optimisation of cancer control and preservation of continence and erection in candidates for radical prostatectomy: an update[J]. Eur Urol, 2016,70(2):301-311. |
| [6] | FICARRA V, NOVARA G, ROSEN R C, et al. Systematic review and meta-analysis of studies reporting urinary continence recovery after robot-assisted radical prostatectomy[J]. Eur Urol, 2012, 62(3): 405-417. |
| [7] | CENTEMERO A, RIGATTI L, GIRAUDO D, et al. Preoperative pelvic floor muscle exercise for early continence after radical prostatectomy: a randomised controlled study[J]. Eur Urol, 2010, 57(6): 1039-1043. |
| [8] | SCHIFANO N, CAPOGROSSO P, TUTOLO M, et al. How to prevent and manage post-prostatectomy incontinence: a review[J]. World J Mens Health, 2021, 39(4): 581-597. |
| [9] | TUTOLO M, BRUYNEEL L, VAN DER AA F, et al. A novel tool to predict functional outcomes after robot-assisted radical prostatectomy and the value of additional surgery for incontinence[J]. BJU Int, 2021, 127(5): 575-584. |
| [10] | ZHANG F, CHU H L, HAO Y C, et al. Preoperative predictive model of early urinary continence recovery after laparoscopic radical prostatectomy[J]. World J Urol, 2023, 41(1): 59-65. |
| [11] | GU Z R, ZHENG Z T, ZHANG W T, et al. The development and assessment of a predicting nomogram for the recovery of immediate urinary continence following laparoscopic radical prostatectomy[J]. Front Surg, 2023, 9: 1071093. |
| [12] | PARK J J, HONG Y, KWON A, et al. Efficacy of surgical treatment for post-prostatectomy urinary incontinence: a systematic review and network meta-analysis[J]. Int J Surg, 2023, 109(3): 401-411. |
| [13] | LARDAS M, GRIVAS N, DEBRAY T P A, et al. Patient- and tumour-related prognostic factors for urinary incontinence after radical prostatectomy for nonmetastatic prostate cancer: a systematic review and meta-analysis[J]. Eur Urol Focus, 2022, 8(3): 674-689. |
| [14] | GACCI M, DE NUNZIO C, SAKALIS V, et al. Latest evidence on post-prostatectomy urinary incontinence[J]. J Clin Med, 2023, 12(3): 1190. |
| [15] | KOHJIMOTO Y, YAMASHITA S, KIKKAWA K, et al. The association of length of the resected membranous urethra with urinary incontinence after radical prostatectomy[J]. Urol J, 2020, 17(2): 146-151. |
| [16] | WANG M, DENG R Q, WANG L, et al. Association between 3D membranous urethral parameters and urinary continence recovery after RARP[J]. Eur J Med Res, 2024, 29(1): 165. |
| [17] | SONG C, DOO C K, HONG J H, et al. Relationship between the integrity of the pelvic floor muscles and early recovery of continence after radical prostatectomy[J]. J Urol, 2007, 178(1): 208-211. |
| [1] | TANG Kairan, FENG Chengling, HAN Bangmin. Integrated single-cell and transcriptome sequencing to construct a prognostic model of M2 macrophage-related genes in prostate cancer [J]. Journal of Shanghai Jiao Tong University (Medical Science), 2025, 45(5): 549-561. |
| [2] | CHEN Rong, ZHANG Meng, ZHU Diqi, GUO Ying, SHEN Jie. Nomogram for predicting the risk of coronary artery lesions in patients with Kawasaki disease based on anti-neutrophil cytoplasmic antibodies [J]. Journal of Shanghai Jiao Tong University (Medical Science), 2025, 45(4): 459-467. |
| [3] | LIU Chuxuan, ZUO Jiaxin, XIONG Ping. A nomogram based on ultrasound scoring parameters and clinical indicators for differentiating primary Sjὅgren′s syndrome from IgG4-related sialadenitis [J]. Journal of Shanghai Jiao Tong University (Medical Science), 2025, 45(3): 373-380. |
| [4] | LU Jiaping, LIU Xing, ZHANG Linshan, ZHAO Lin, ZHANG Min, LI Xiaoying, LIU Yuejun. Relationship between abdominal fat area and first-phase insulin secretion function of pancreatic β-cells in patients with type 2 diabetes [J]. Journal of Shanghai Jiao Tong University (Medical Science), 2025, 45(1): 42-50. |
| [5] | CAI Renjie, XU Ming. KHSRP regulates the responsiveness of prostate cancer cells to androgens through ANK3 [J]. Journal of Shanghai Jiao Tong University (Medical Science), 2024, 44(4): 417-426. |
| [6] | DENG Qingsong, ZHANG Changqing, TAO Shicong. Exploration of the relationship between nicotinamide metabolism-related genes and osteoarthritis [J]. Journal of Shanghai Jiao Tong University (Medical Science), 2024, 44(2): 145-160. |
| [7] | YANG Jingyu, CHEN Liubao, WANG Kangtai, YANG Xingzhi, YU Haitao. Establishment and evaluation of nomogram for differential diagnosis of systemic lupus erythematosus based on laboratory indications [J]. Journal of Shanghai Jiao Tong University (Medical Science), 2024, 44(2): 204-211. |
| [8] | YAN Yeqing, LIANG Sheng, YANG Bin, ZOU Renjian, MA Yufei, CAI Lisheng, WANG Hui, FU Hongliang. Role of 18F-MD-PSMA PET/CT in initial stage of intermediate and high risk prostate cancer [J]. Journal of Shanghai Jiao Tong University (Medical Science), 2023, 43(7): 873-881. |
| [9] | RAO Lin, ZHANG Linna, YUAN Jiaqi, LU Bangchun. Effect of postpartum pelvic floor muscle training on improving pelvic floor function [J]. Journal of Shanghai Jiao Tong University (Medical Science), 2023, 43(3): 308-313. |
| [10] | YANG Wanli, SONG Juan, LI Bing, LAO Yimin. Deciphering the suppressive effects of CBX8 on prostate cancer cell invasion [J]. Journal of Shanghai Jiao Tong University (Medical Science), 2023, 43(12): 1507-1519. |
| [11] | XUE Linlin, LI Binghan, CHANG Lixian, LI Weikun, LIU Chunyun, LIU Li. Construction and evaluation of a nomogram prediction model for bacterial infection in patients with decompensated hepatitis C cirrhosis [J]. Journal of Shanghai Jiao Tong University (Medical Science), 2023, 43(1): 52-60. |
| [12] | DENG Lu, LI Jiayi. Research progress of fractional CO2 laser therapy in female stress urinary incontinence [J]. Journal of Shanghai Jiao Tong University (Medical Science), 2022, 42(5): 685-689. |
| [13] | WANG Hui, ZHAO Ying, WEN Lirong, CAO Jun, YANG Jiping, YUAN Yongming. Diagnostic value of PSA, TAP and MACC1 expression in blood of patients with prostate cancer [J]. Journal of Shanghai Jiao Tong University (Medical Science), 2022, 42(4): 496-501. |
| [14] | Yekai WANG, Wei CHEN, Yinghui YANG, Jingze WU, Heping WANG, Yanzhen YAO, Zhoujun BAO. Establishment of a nomogram clinical scoring system for the risk of heterotopic ossification in patients undergoing surgery after fracture [J]. JOURNAL OF SHANGHAI JIAOTONG UNIVERSITY (MEDICAL SCIENCE), 2022, 42(2): 166-172. |
| [15] | Xue-yao WANG, Wei-hua PAN, Wei-peng WANG, Quan-hua LIU, Wei XIE, Lei WANG, Jun WANG. Evaluation of postoperative pulmonary function in children with congenital diaphragmatic hernia and analysis of influencing factors [J]. JOURNAL OF SHANGHAI JIAOTONG UNIVERSITY (MEDICAL SCIENCE), 2021, 41(9): 1169-1174. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||